Simultaneous Localization and Mapping
The problem of SLAM consists of a closed loop pose estimation from measurements and measurement aggregation using the estimated poses. This system maps the environment around a moving vehicle using a probabilistic occupancy grid model and estimates EGO motion within the same environment by using a feedback loop. Input data is provided by LiDAR in the form of a 3D point cloud which is projected on the local ground plane. In this 2D setting, the pose estimation problem is simplified from 6DOF to 3DOF (degrees of freedom) which greatly increases the robustness and accuracy of the system.
The system estimates the local ground plane from the current point cloud data using a robust plane fitting scheme based on the RANSAC principle. Then the current occupancy map is registered against the previous map using phase correlation. Experimental results demonstrate that the method produces high quality occupancy maps and the measured translation and rotation errors of the trajectories are lower compared to other 6DOF methods. The system is designed to run on a GPU enabled computer and was fully developed using the Quasar programming language. Execution time is kept below 100ms per point cloud on a mid-range GPU which allows the system to keep up with data from the LiDAR.
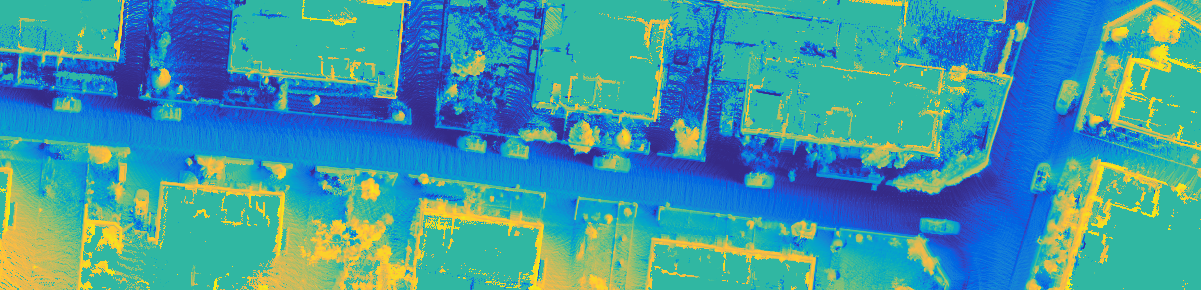
Operation of the system on real world data
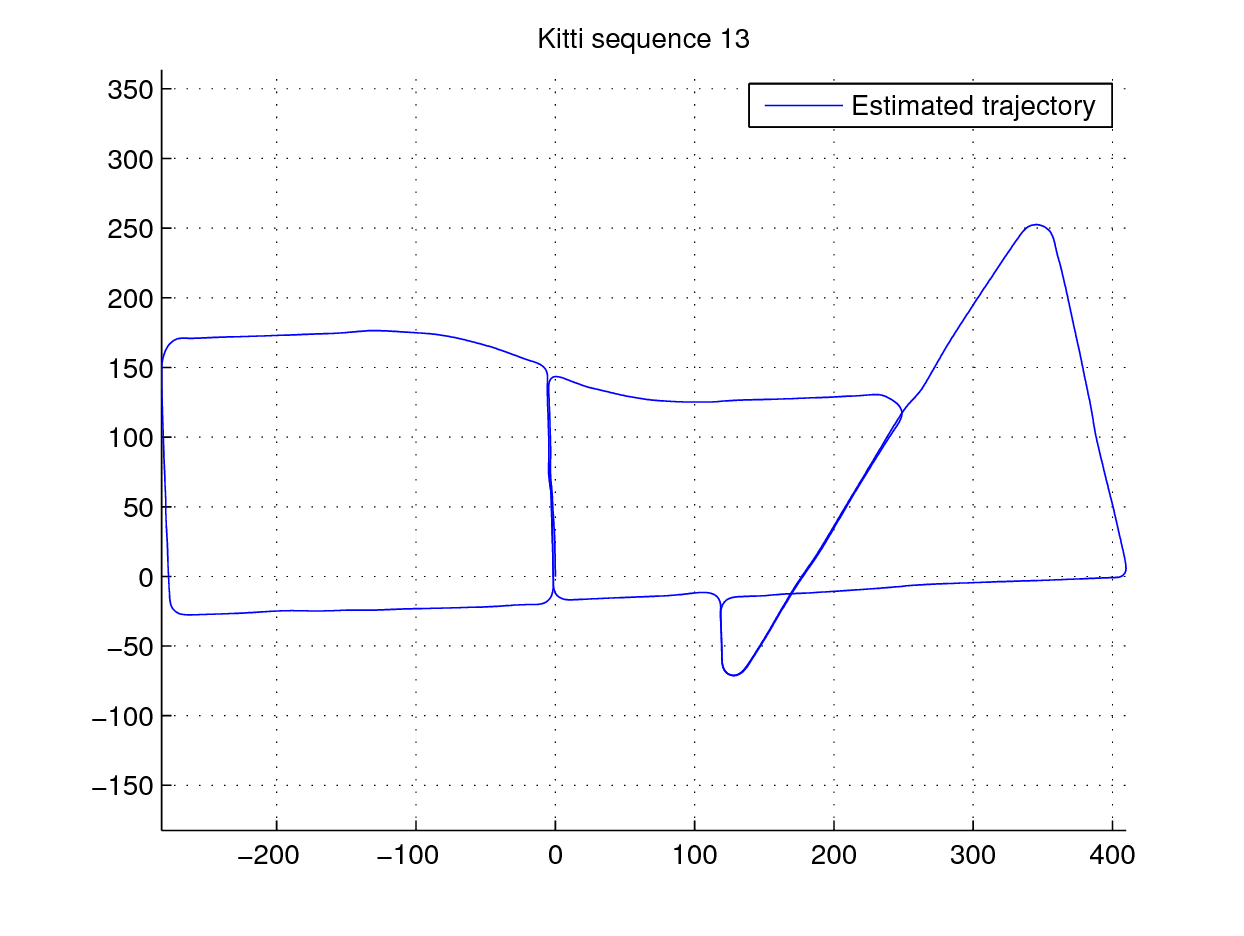
Left: Input point cloud data, center: estimated trajectory, right: generated map of the environment.
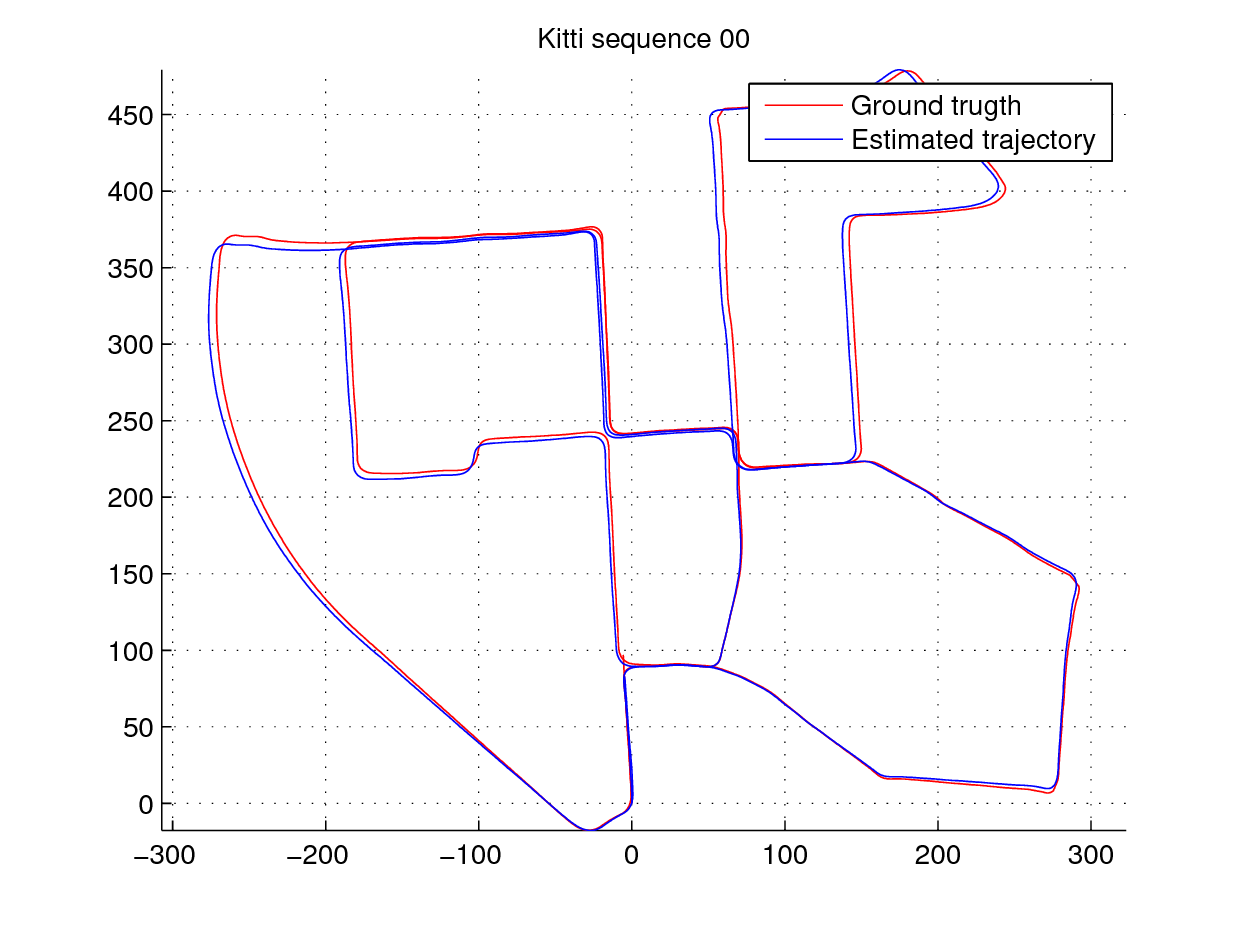
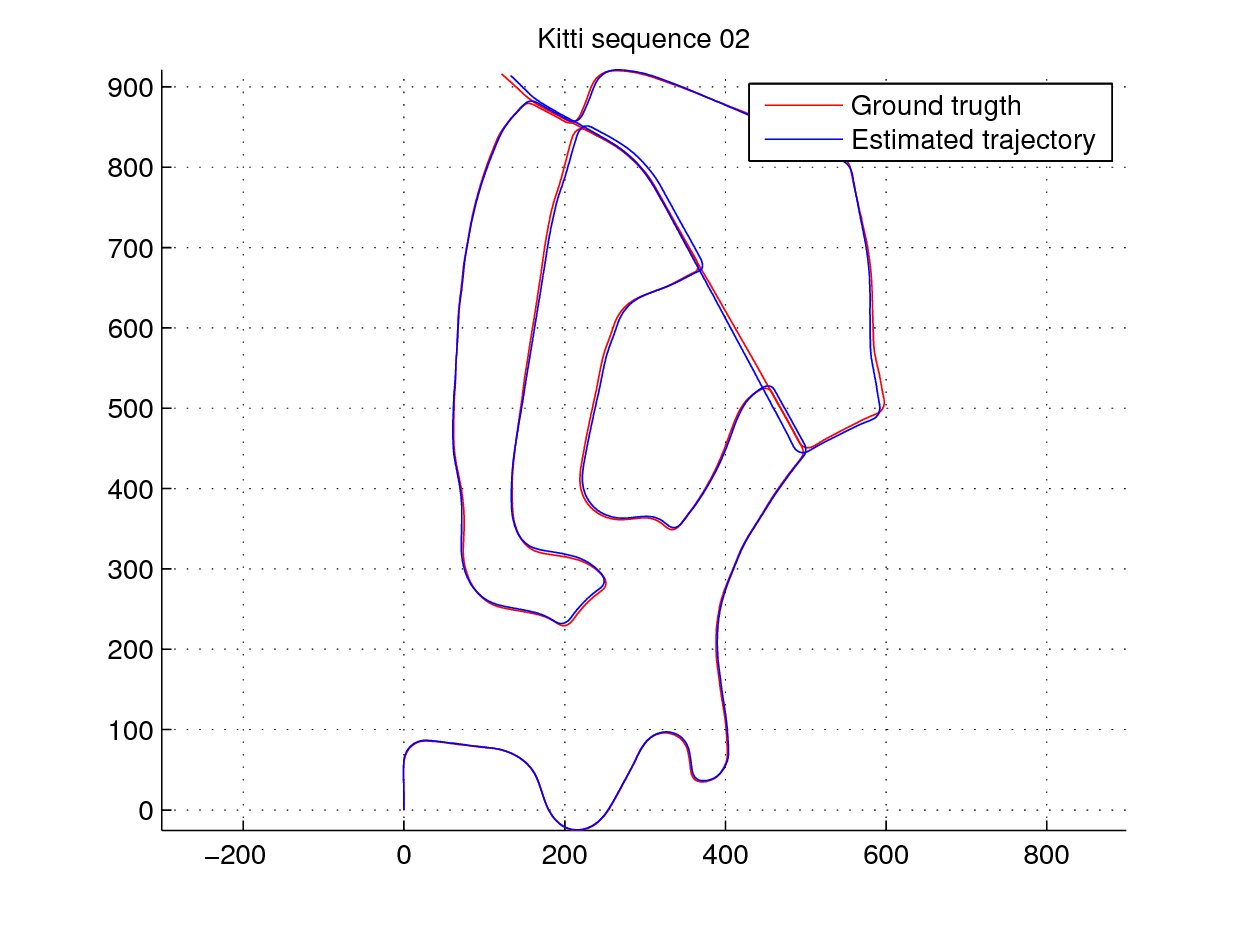
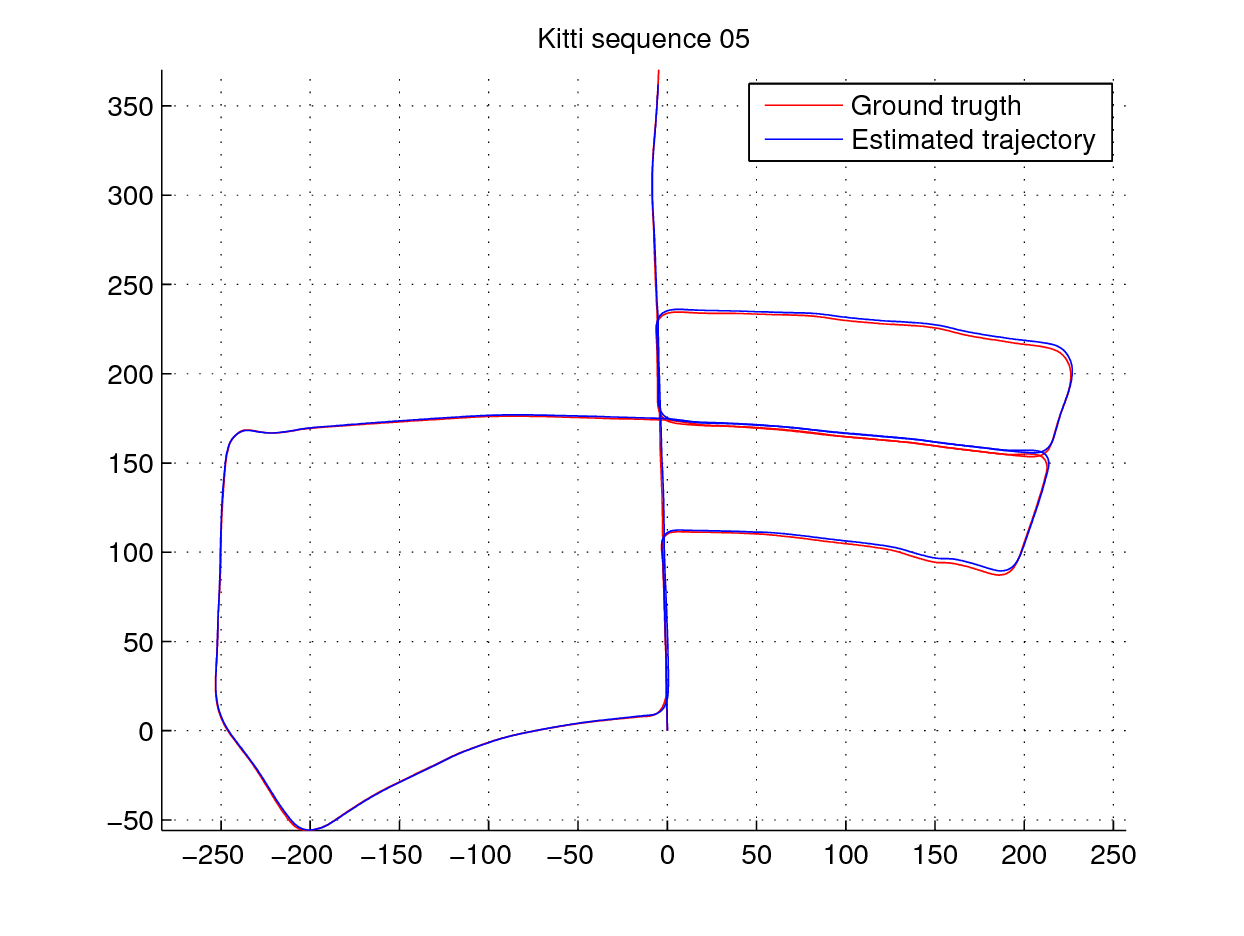
Rotation and translation estimation experiments on real-world data produced average translation error of 0.29% and average rotation error of 0.0038[degrees/m] for trajectories of length 100m to 800m i.e. if the EGO vehicle is moving with a constant velocity of 30Km/h we can expect an accumulation of positional error at the rate of 1m in 40s and heading error of 1 degree in 30s.
|
|
|
|
For more details please refer to the text in the following publication: "Robust matching of occupancy maps for odometry in autonomous vehicles" Martin Dimitrievski UGent, David Van Hamme UGent, Peter Veelaert UGent and Wilfried Philips UGent, (2016) Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications. 3. p.626-633